University of Hawaii at Manoa Capstone Project
Duration: 32 weeks
Role: Attitude Control Specialist
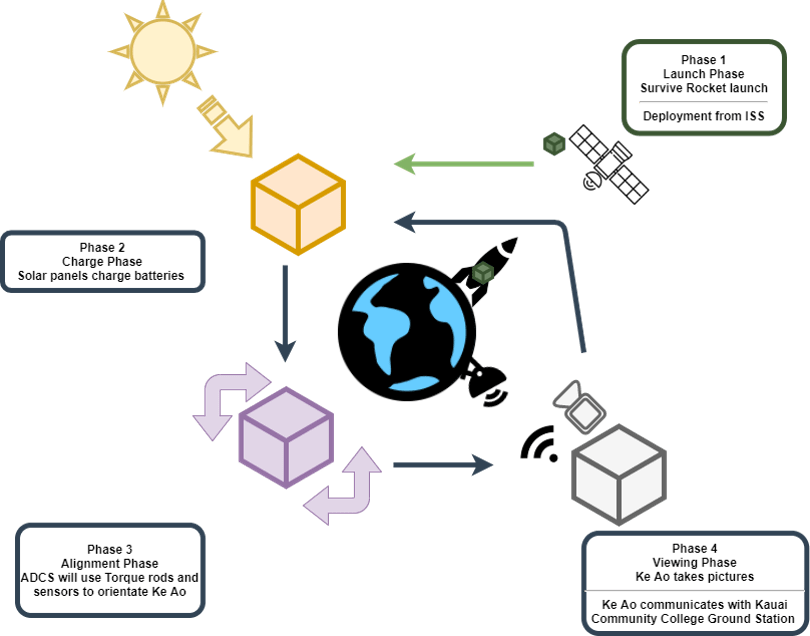
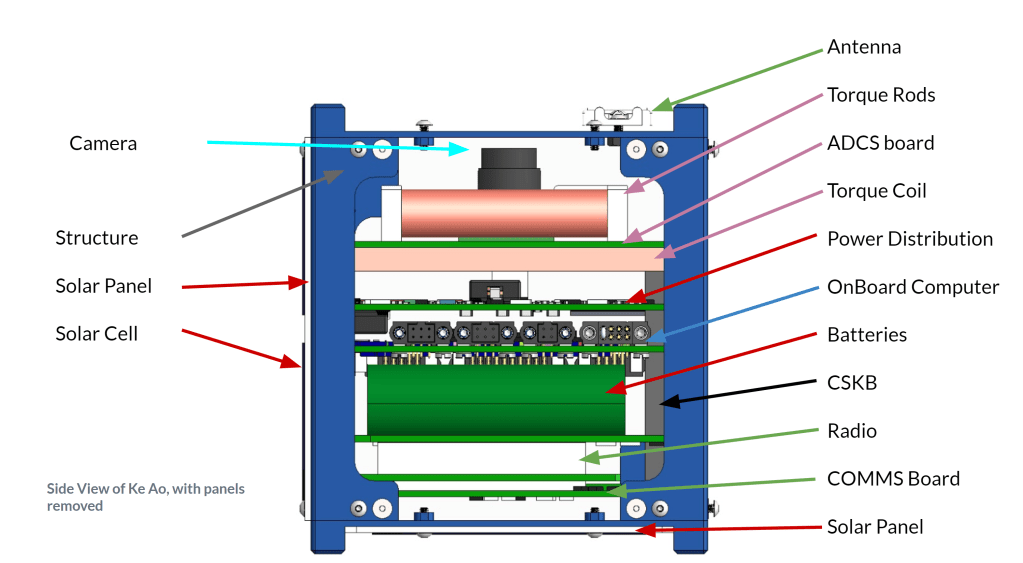
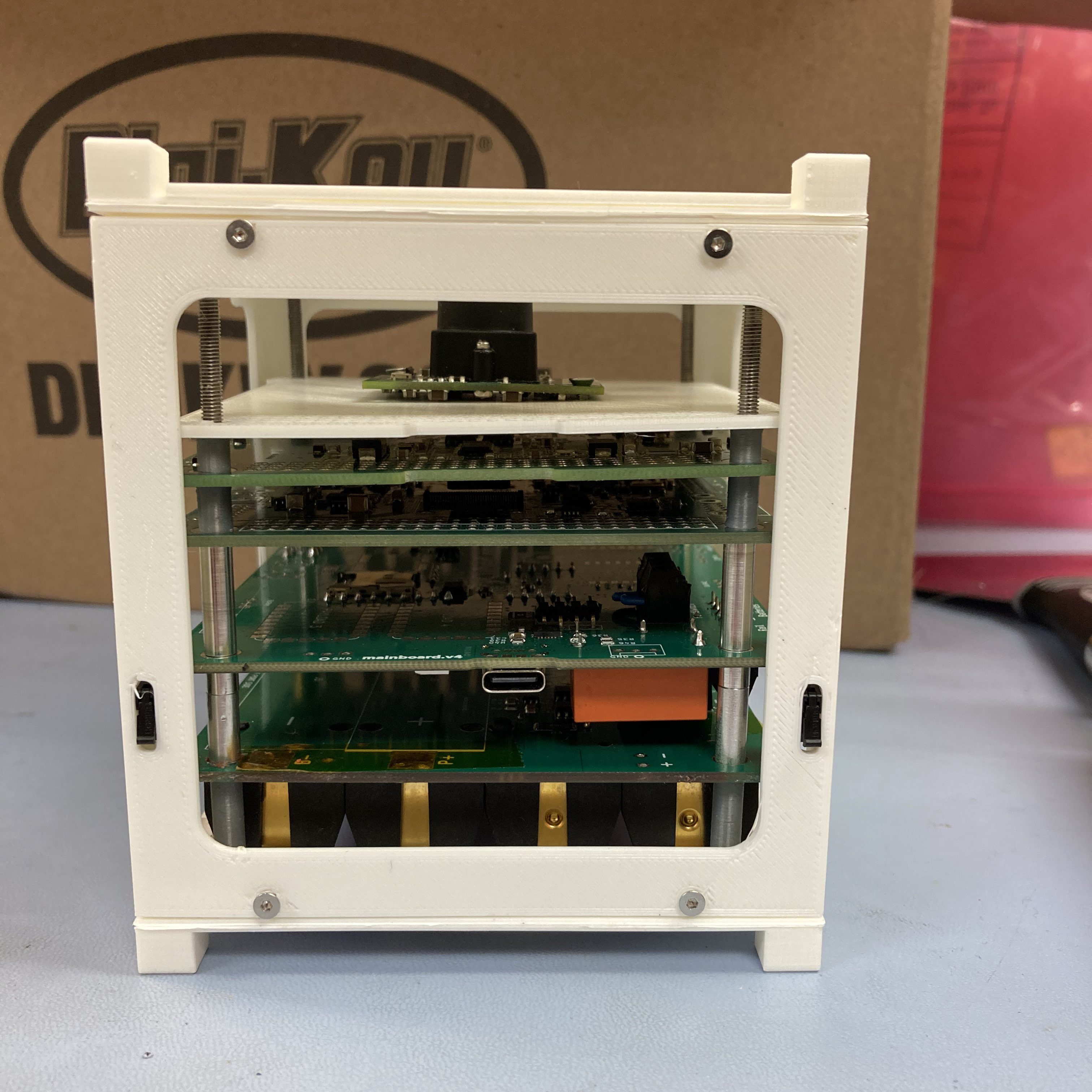
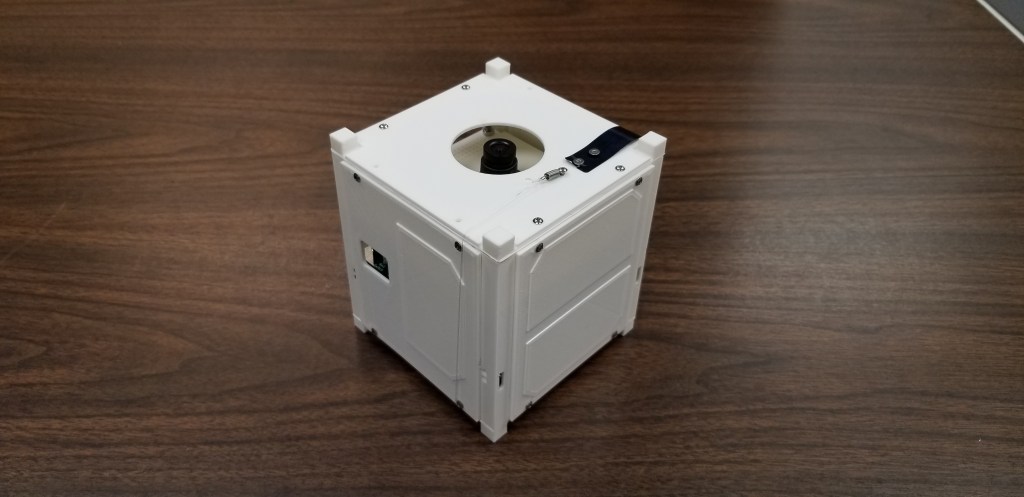
Mission: Design a low-cost 1U CubeSat (nanosatellite) subjected to low-earth orbit conditions with the ability to take a picture from space and serve as a foundational platform for future student research groups.
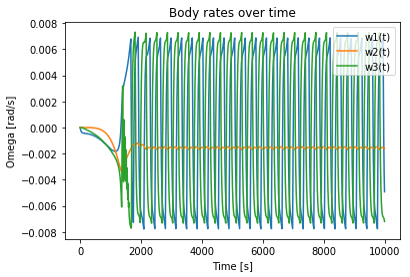
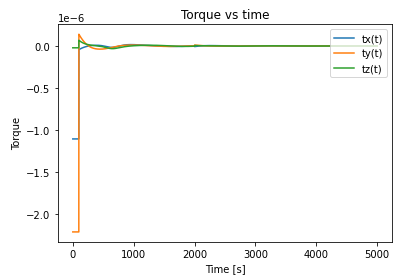
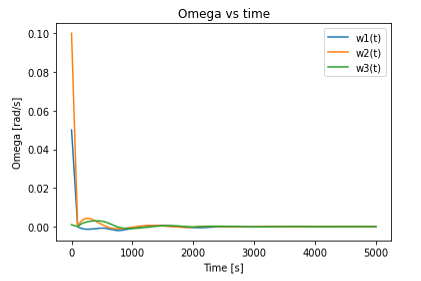
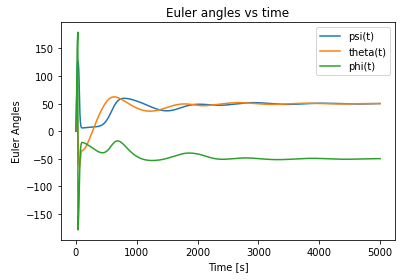
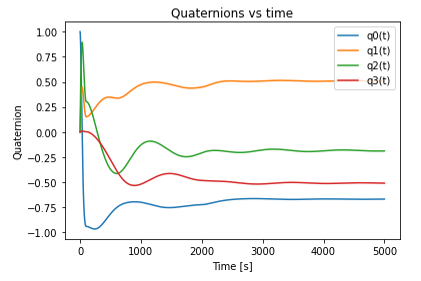
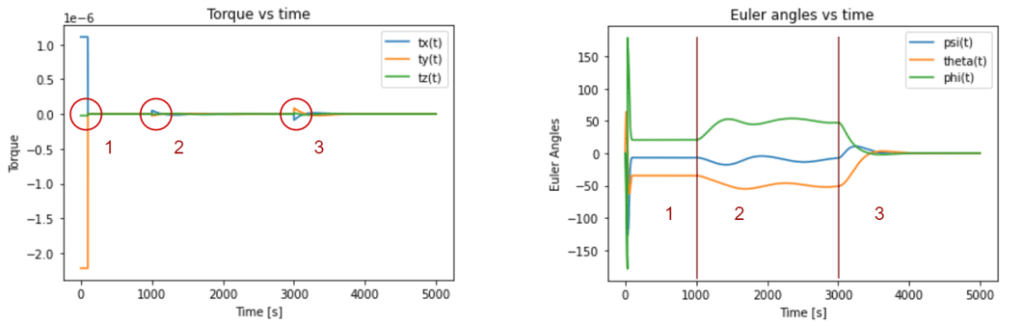
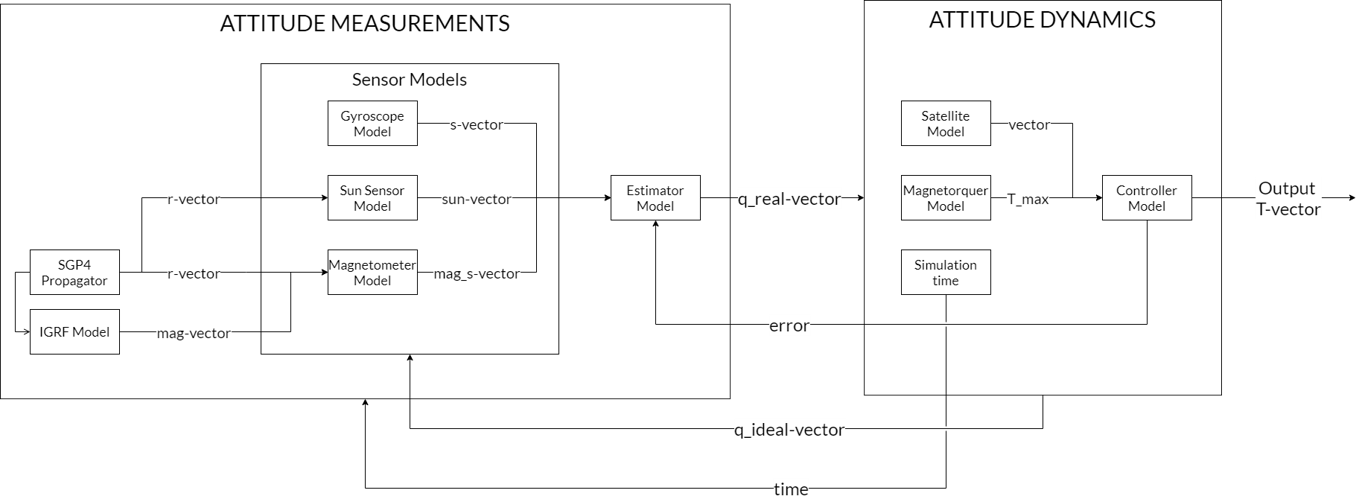
Approach: Finalize a proof of concept for attitude control and estimation by developing dynamical models. Python was used to create a rudimentary models focused on the detumbling of a satellite. Initial conditions were set for the torque, body rates, quaternion vectors and incorporating a simple PD controller. Trade studies were also performed on existing OTS components and attitude actuators modeled using SolidWorks.