Autonomous Control Theory Club
Duration: 1 year
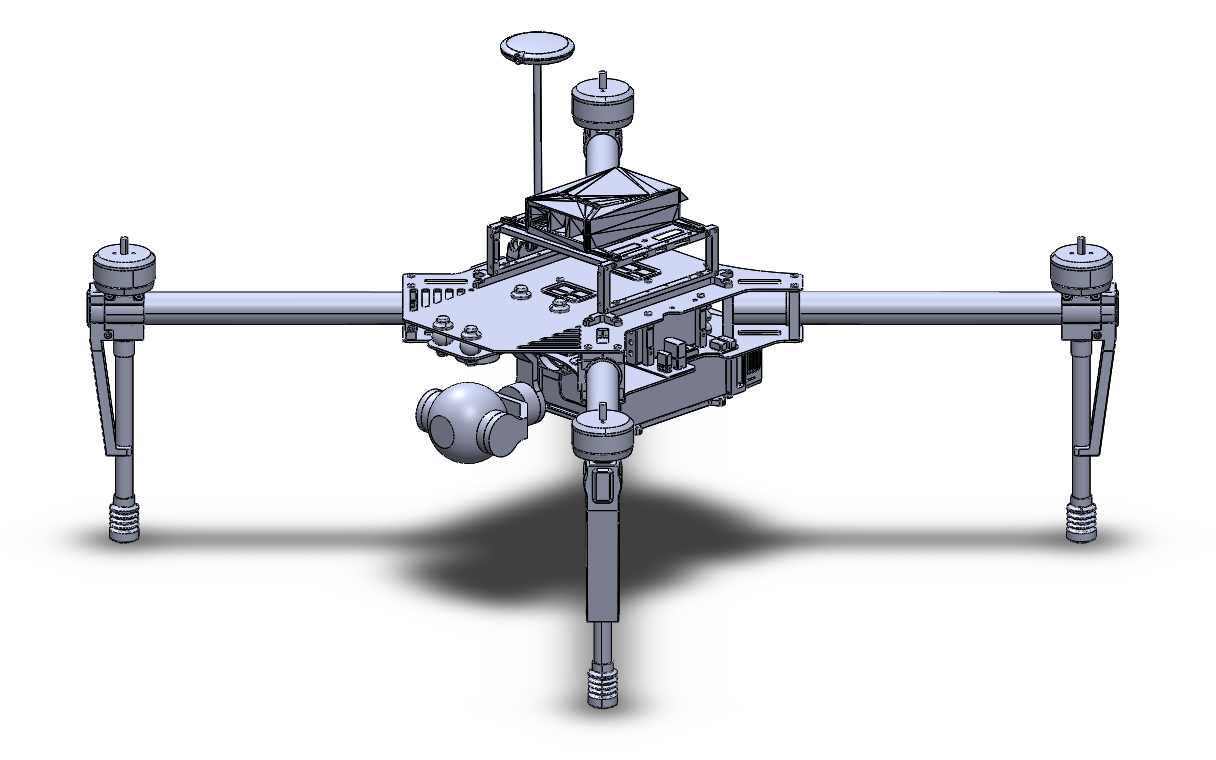
Role: Mechanical Lead – Payload and Structure
Mission: Learn about Unmanned Aerial System kinematics, dynamics, navigation, guidance, and control while exploring a wide range of applications (agriculture and environment surveillance).
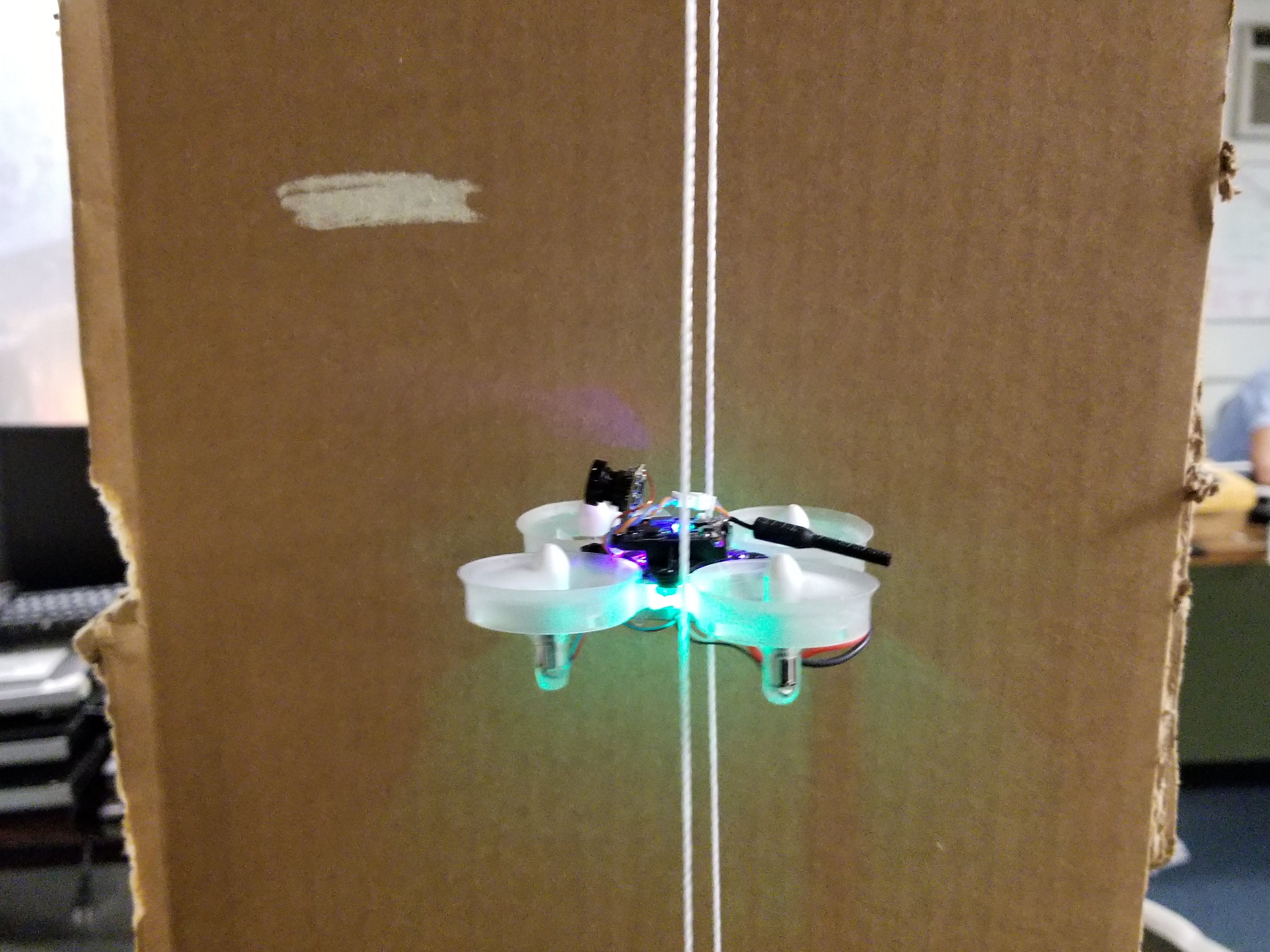
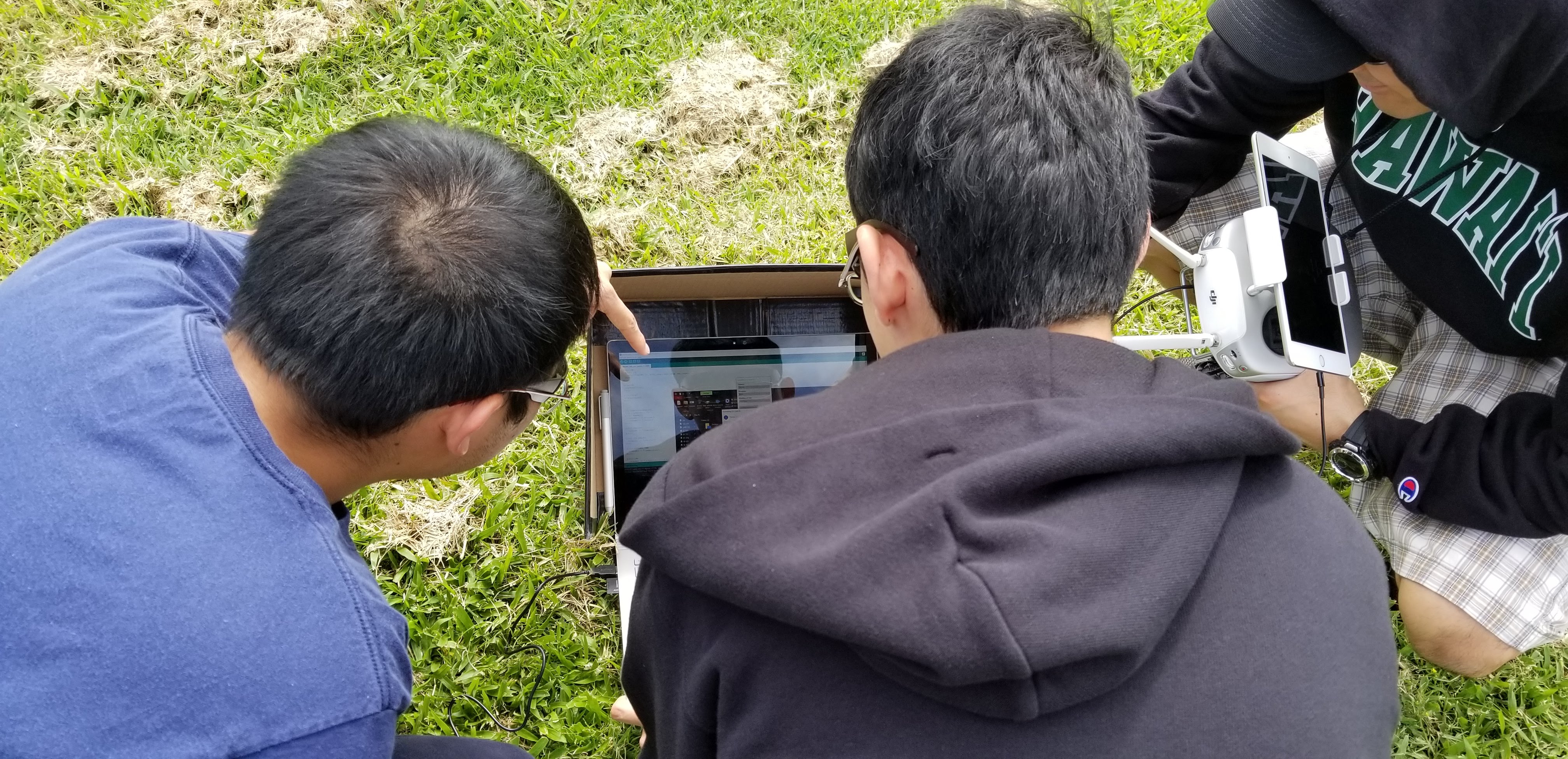
Approach: Build a miniature quadcopter and conduct MATLAB simulations to study and experiment with control laws (PID). Construct a fixed-wing drone using OEM parts to explore different waypoint configurations using Mission Planner on Ardupilot software. Lastly, build upon the DJI M100 quadcopter to collect in-flight data and compare to existing navigation functions.